







ENGINEERINGNET.BE - De E-ELT (European Extremely Large Telescope), die ook omschreven wordt als “het ‘s-werelds grootste oog naar de ruimte”, is bedoeld om wetenschappers te helpen bij het zoeken naar planeten die zich in een baan om andere sterren bevinden, naar fundamentele antwoorden met betrekking tot de vorming van planeten en naar het beter begrijpen van de aard en de verdeling van zwarte materie en zwarte energie. Het E-ELT-project werd uitgevoerd door het ESO (European Southern Observatory).
De E-ELT bevat een hoofdspiegel met een diameter van 39 meter, waardoor het ’s-werelds grootste optische en nabij-infrarood telescoop is. Het vervaardigen, in gebruik nemen en onderhouden van een spiegel van 39 meter is erg lastig. Er is daarom gebruik gemaakt van circa 800 hexagonale spiegelelementen (figuur bovenaan) met elk een diameter van 1,5 meter, die samen de primaire spiegel M1 vormen.
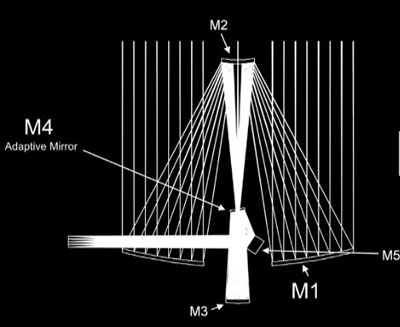
Ter vergelijking: de primaire spiegel van de Hubble Space Telescope heeft een diameter van 2,4 meter. Het tegengaan van de beelddegradatie als gevolg van afwijkingen in het optische ontwerp en de atmosferische storingen wordt gerealiseerd doordat de E-ELT gebruik maakt van een innovatief systeem van actieve en adaptieve optiek voor de M1- en de M4-spiegels
Engineers van de Instituto de Astrofysica de Canarias maken gebruik van LabVIEW Real-Time en LabVIEW FPGA module met het PXI-platform om aan de real-time eisen te voldoen. Het systeem biedt bovendien de noodzakelijke flexibiliteit voor het actuator positiesysteem van de M1-spiegels.
De domein-experts van het ESO en het Instituto de Astrofysica de Canarias hebben met behulp van een commercieel beschikbaar platform, zoals LabVIEW dat real-time programmering en het gebruik van FPGA-gebaseerde systemen mogelijk maakt, een systeem ontwikkeld dat voldoet aan de gestelde real-time eisen en toch voldoet aan een zo kort mogelijke ontwikkeltijd.
Actieve en adaptieve optica
De actieve optica bevat een regelsysteem en een combinatie van sensoren en actuatoren waarmee de telescoop de juiste spiegelvorm of instelling kan handhaven. De juiste configuratie voor de telescoop wordt actief beheerd om eventuele resterende afwijkingen in het optische ontwerp te verkleinen en de efficiëntie en de fouttolerantie te verbeteren.
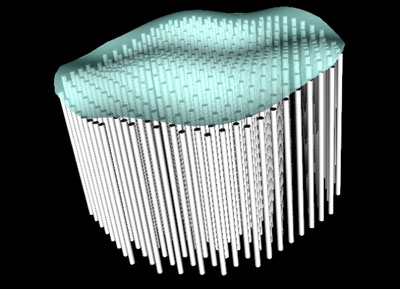
Adaptieve optica monitort de gevolgen van de atmosferische interferenties (storingen als gevolg van invallend licht) honderden keren per seconde en corrigeert deze door fysiek een dunne spiegel (figuur 3), die bekend staat als M4, te vervormen. De voorste golfsensoren werken snel om de atmosfeer te bemonsteren en transformeren elke willekeurige afwijking naar spiegelcommando’s.
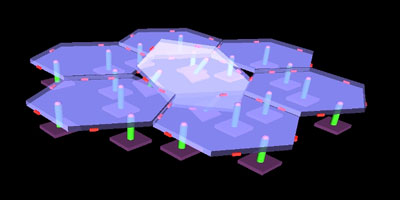
Zowel de actieve als de adaptieve optica vereisen zeer snelle software en hardware die in staat zijn te communiceren met honderden sensoren en servoregelaars. Iedere spiegel die in figuur 2 wordt weergegeven kan real-time worden bewogen met behulp van drie positie actuatoren om de vervorming van de onderliggende ondersteunende structuur te compenseren.
Een vervorming die optreedt als gevolg van de zwaartekracht, temperatuur en windsnelheid. De besturing van een dergelijk complex systeem vereist een extreme hoeveelheid aan verwerkingscapaciteit om de binnenkomende gegevens van de sensoren te beheren, de positie te berekenen en vervolgens om de actuatoren aan te sturen.
De engineers van National Instruments werkten tijdens de ontwerpfase van het E-ELT-project samen met het ESO om de requirements van het besturingssysteem voor M1 en M4 te bepalen.
Daarnaast werkten de engineers aan de Instituto de Astrofísica de Canarias in Spanje aan de ontwikkeling van de elektronische en embedded software op basis van de NI LabVIEW software en het NI PXI-platform voor het beheren en coördineren van de drie nanometrische actuator prototypen.
Dit artikel heeft betrekking op extreem krachtige berekeningseisen van het besturingssysteem en het ontwikkelde systeem voor de aansturing van de positie van de individuele spiegelsegmenten.
Extreme berekeningseisen aan het besturingssysteem
Als M1 in bedrijf is kunnen de aangrenzende spiegelsegmenten kantelen ten opzichte van de andere segmenten. Deze afwijking wordt met behulp van de randsensoren gemonitord en de aanwezige actuator kan de segmenten in iedere willekeurige noodzakelijke positie drie graden verplaatsen.
Het segment met de 800 spiegels omvat ongeveer 3000 actuatoren en 6000 sensoren. Het systeem moet de sensoren kunnen uitlezen om de locatie van het spiegelsegment te bepalen en, als de segmenten zich verplaatsen, de actuatoren inzetten om ze opnieuw te kunnen uitlijnen. Het op LabVIEW-gebaseerde systeem berekent een 3000 x 6000 matrix 6000 vectorproducten. Het systeem moet deze berekening 500 tot 1000 maal per seconde realiseren om een effectieve spiegelaanpassing te kunnen verkrijgen.
De sensoren en actuatoren besturen ook de M4 adaptieve spiegel. M4 is een dunne vervormbare spiegel met een diameter van 2,5 meter en ligt op 8000 actuatoren (figuur 3). Het probleem is gelijk aan de actieve spiegelbesturing van M1: in plaats van echter de vorm te behouden, wordt het aangepast op basis van het gemeten golffront uit de beelddata. De berekeningsuitdaging voor de besturing van M4 is ongeveer vijftienmaal die van de berekeningseisen van M1.
De omvang van dit wiskundige en regelprobleem vereist het simuleren van de lay-out en het ontwerpen van de besturingsmatrix en de regelkring. De kern van deze bewerkingen wordt gevormd door de zeer grote LabVIEW matrix-vectorfunctie die het gros van de berekeningen op zich neemt. M1- en M4-regelingen vereisen een enorme verwerkingscapaciteit die in staat moet zijn om de matrix-vectorvermenigvuldiging uit te voeren. Dit werd bereikt door gebruik te maken van commercieel verkrijgbare (COTS – commercial-off-the-shelf) multicore systemen.
Het complexe besturingssysteem kan effect hebben op verschillende kenmerken en eigenschappen van de telescoop, daarom was het noodzakelijk dat het systeem ruim voor de werkelijke bouw van de E-ELT moest worden ontwikkeld. Engineers ontwikkelden een systeem dat aan deze uitdaging tegemoet komt, een systeem dat een real-time simulatie van de M1-spiegel uitvoert om daarmee een HIL (hardware-in-the-loop) regelsysteemtest te realiseren.
HIL is een testmethode die veel toegepast wordt in de besturings- en regelsystemen binnen de automotive en in de ruimtevaart om daarmee een controller te valideren met behulp van een zeer nauwkeurige, real-time systeemsimulator. De simulatie van het regel- en besturingssysteem was eveneens ontwikkeld met behulp van LabVIEW en uitgevoerd op een multicore PC waarop het LabVIEW Real-Time Module draait voor de deterministische verwerking.
De telescoopsimulator werd vervolgens ingezet op twee beschikbare Dell werkstations voorzien van acht processorkernen. De volledige regellus nam veel minder tijd in beslag dan de vereiste 1 ms die voor de effectieve besturing van de spiegels ter beschikking stond.
Embedded systeem voor het positioneren van de actuator
Elk van de 800 spiegelsegmenten van de M1-spiegel heeft drie positie-actuatoren (figuur 4) en zes randsensoren. De grootste uitdaging voor de actuatoren waren de eisen van een 15mm-verplaatsing, ondersteuning van een massa van 90 kg, een RMSE (root mean square error – effectieve foutwaarde) van 1,7 nm bij een langzame zwaai, een 1 kHz updatesnelheid van positioneringscommandos en een zeer kleine vertraging en jitter. Het mechanische voorstel voor de actuator bestaat uit een tweetraps-ontwerp.
De eerste en grofste fase met een borstelloze motor geeft een grote uitslag en een grove resolutie. De fijn-afstemming gebeurt met een spoel en levert een fijne, hoge resolutie, een grote bandbreedte en een kleine uitslag.
Elke fase maakt gebruik van een eigen elektronische voeding, terugkoppelsensor en een servo-controller. De fijne en de grove faseregelingen functioneren als één geheel in ‘overleg’ met elkaar om de aandrijving als één geheel te laten werken.
De elektronica en de software voor de volledige coördinatie, beheer van externe commando’s, functionaliteit debugging en de implementatie van de servo-controllers is gebaseerd op een PXI-systeem met een real-time besturingssysteem (OS – Operating System).
De servo-controller van de snelle fijne regeling is op een FPGA-gebaseerde PXI-module ondergebracht, terwijl de langzame grove besturing op de PXI-controller (d.w.z. een CPU met real-time OS) is geïmplementeerd. Bovendien is het software-ontwerp verdeeld over twee applicaties: de embedded software voor de actuator en een telescoop simulatorontwerp als een hulpmiddel om de telescoopcomputer die met de interfaces van de actuatoren is gekoppeld te simuleren.
Actuator software
De real-time software bevat de functionaliteit van iedere actuator – initiële zelfcheck, een toestandsmachine, statusberichten, een foutregister en het beheer van de configureerbare parameters.
Andere uitgevoerde taken zijn de besturing van de ingangen die van de FPGA afkomstig zijn met de seriële peripheral interface (SPI), de implementatie van de grove servo-besturing die via een controller area netwerk (CAN) of CANopen, het beheren van een circulaire buffer voor de foutopsporing (debugging) met gesynchroniseerde data die afkomstig is van een FIFO op de FPGA-module, en het uitlezen van de terugkoppelsensoren via UDP/IP. De FPGA-module bevat de code voor de SPI-communicatie, de fijne servo besturing, het analoog lezen en schrijven, en de synchronisatie om gegevens naar de real-time controller te sturen via een FIFO.
De telescoopsimulator
Om de positie-actuatoren te testen op hun eisen is een tweede applicatie ontwikkeld voor het simuleren van de telescoopcomputer waarmee de actuatoren moeten interfacen via de SPI-bus. Deze computer speelt de rol van SPI-master terwijl de actuatoren functioneren als SPI-slaaf.
Deze ondersteunende toepassing stuurt miljoenen positiecommando’s via de SPI op 1 kHz en leest de antwoorden van de SPI die afkomstig zijn van de actuatoren eveneens op 1 kHz. Het leest tevens de digitale data op 5 kHz van een additionele externe positiesensor die in de mechanische testtafel is geïnstalleerd om deze te vergelijken met de interne sensor van de actuator.
Deze drie bronnen moeten gelijktijdig ingelezen worden, gesynchroniseerd binnen 200 µs en tevens opgeslagen worden in binaire bestanden voor offline analyse. Deze oplossing is eveneens geïmplementeerd met behulp van een FPGA-gebaseerde kaart van NI maar wel geïnstalleerd op een PC die onder het Windows besturingssysteem draait.
Real-time prestaties en flexibiliteit
De actuator elektronica en de software bevatten meerdere verschillende interfaces, waarvan de meeste nog tijdens de eerste ontwikkelfase kunnen worden aangepast. Hieronder vallen SPI, CAN-bus, analoge in- en uitgang, digitale ingang, TCP/IP en UDP/IP. Het gebruik van deze interfaces vergt een enorme flexibiliteit.
Daarnaast werden er hoge eisen aan het real-time gedeelte gesteld, waaronder het uitlezen van de digitale commando’s op 80 MHz en het uitvoeren van de PID-regeling (Proportionele Integrerende Regeling) van de snelle fijne fase servo-controller tussen 2 kHz en 10 kHz.
Het systeem moest tevens in real-time synchroniseren en grote binaire bestanden kunnen opslaan voor de offline analyses van de externe SPI-commando’s (1 kHz); de analoge acquisitie van de spoelstroom (2 kHz); het verzamelen van de sensordata positionering via Ethernet (2 – 10 kHz); en de interne variabelen van de servo-controller (2 – 10 kHz) instellen.
Auteur Arun Veeramani, Senior Technical Marketing Manager, Scientific Research & Lead User Program, National Instruments
Klik op de link voor meer informatie:
CompactRIO - LabVIEW
Figuur boven: Artistieke impressie van de rendering van de European Extremely Large Telescope (E-ELT).
Voor meer informatie:
National Instruments
Ikaroslaan 79 - B-1930 Zaventem
www.ni.com/nl-be.html
Bericht van de redactie: dit is een ingezonden mededeling, die mogelijk niet vrij is van commerciële invloeden. De verantwoordelijkheid voor de verstrekte technische en andere gegevens berust volledig bij de vermelde leverancier of fabrikant.

