









ENGINEERINGNET.BE - Tijdens een bezoek aan de virtuele stand van Festo op de Virtual Fair (op 15 en 16 juli) valt er te netwerken, kan je één van de live streamings bijwonen, op eigen tempo hun producten bekijken en vragen stellen aan productspecialisten via een live chat. Het bedrijf zal er drie bionic-projecten tonen: de Bionic Flower, de BionicSwift en de BionicMobileAssistant.
De Bionic Flower is gemodelleerd naar mimosa- en waterlelieplanten. Hij opent en sluit zijn bloemblaadjes als reactie op externe invloeden, zoals aanraking, nabijheid of licht. Deze STEM-bouwdoos werd ontwikkeld in samenwerking met SkySpirit. In het klaslokaal kunnen leerlingen van 10 jaar en ouder met sensoren en besturingstechnologie de ingebouwde mechanismen verkennen.
Een elektrisch aangedreven stappenmotor opent en sluit de bloemblaadjes. Een smartphone, tablet of pc met wifi-verbinding kan beweging en lichteffecten aansturen. De microprocessor is te programmeren met de "Open Roberta" grafische interface. Ervaren studenten kunnen deze ook in C++ programmeren.
Bijbehorend lesmateriaal, evenals een handleiding om de bloem in elkaar te zetten, kan kosteloos gedownload worden via www.bionics4education.com. Leerlingen kunnen de bloem ook aanpassen en uitbreiden met 3D-printers, andere materialen, hard- en software.
De BionicSwift is een wendbare kunstvogel die met een radiogebaseerde binnenshuis GPS met ultra-breedbandtechnologie (UWB) alleen en in groep een gecoördineerd patroon kan afvliegen binnen een gedefinieerde ruimte. Als de vogels van hun vluchtpatroon afwijken, door plotselinge veranderingen in wind of thermiek, kunnen ze het vluchtpatroon onmiddellijk autonoom corrigeren, zonder menselijke tussenkomst.

Net als bij het biologische model vormt de lichtgewichtconstructie de kern, die 44,5 centimeter lang is en een spanwijdte van 68 centimeter heeft, maar slechts 42 gram weegt. De borstelloze motor, twee servomotoren, de accu, de vertragingskast en de verschillende elektronische circuits zijn gemonteerd in de vogelromp. De extreem wendbare BionicSwift vliegt lussen en nauwe bochten.
De vleugels zijn gemodelleerd naar echte vogelveren. De individuele lamellen van ultralicht, flexibel maar bijzonder stevig schuim overlappen elkaar. Ze zijn bevestigd aan een koolstof schacht die op zijn beurt verbonden is met de hand- en armvleugels, net als in de werkelijkheid.
De lamellen waaieren tijdens de opgaande slag uiteen, zodat de lucht door de vleugel stroomt en de vogel minder kracht nodig heeft om de vleugel naar boven te bewegen. Bij de neergaande slag worden de lamellen gesloten wat de vliegrobot vooruit stuwt.
Festo ziet toepassingen voor deze technologieën, zoals het 3d-navigatiesysteem, in het aansturen van materiaal- en goederenstromen in de digitale fabrieken van de toekomst.
Tot slot de BionicMobileAssistant, een robot die zelfstandig in drie richtingen beweegt, voorwerpen identificeert, ze adaptief vastgrijpt en ... kan samenwerken met mensen. Het modulaire systeem, ontwikkeld in samenwerking met ETH Zürich, bestaat uit drie subsystemen: een mobiele robot (deze balbot heeft wat van BB8 uit de jongste Star Wars), een elektrische robotarm en de BionicSoftHand 2.0.

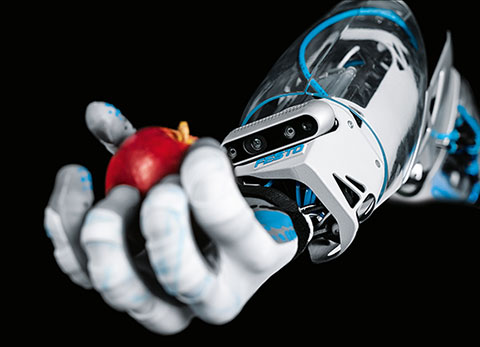
Deze laatste pneumatische grijper (voor het eerst in 2019 gepresenteerd) is geïnspireerd op de menselijke hand. De vingers en de opponeerbare duim zijn gemaakt van flexibele balgconstructies met luchtkamers, omringd door een stevig elastisch weefsel.
De pneumatische vingers worden aangedreven door een compact ventielenblok met piëzoventielen, direct op de hand gemonteerd. Met een grotere laterale uitslag van duim en wijsvinger werken ze nu beter samen om zaken precies vast te grijpen. Een 3d-geprinte pols met twee vrijheidsgraden laat de hand naar voren en naar achteren, links en rechts bewegen.
De hand draagt een handschoen met gevoelige krachtsensoren op de vingertoppen, de palm en de buitenzijde. Zo kan het vast te grijpen voorwerp gevoeld en de grijpkracht aangepast worden.
Aan de binnenkant van de pols detecteert een dieptescanner voorwerpen. De hand kan getraind worden om voorwerpen te onderscheiden. De informatie wordt verwerkt door een neuraal netwerk dat voordien getraind is met behulp van data augmentation.
De robot balanceert op een bal waarmee hij vrij in alle richtingen kan bewegen. De accu voor de arm en de robot is in de romp geplaatst, de persluchtcartridge voor de pneumatische hand is in de bovenarm gemonteerd.
De algoritmes die opgeslagen zijn op de master computer besturen tevens de autonome bewegingen van het systeem. De robot oriënteert zichzelf zelfstandig in drie dimensies met behulp van twee camera's.
Het systeem kan gebruikt worden als robotassistent, bijvoorbeeld in de bediening, als helpende hand bij assemblage of als hulpje bij ergonomisch zware of monotone opdrachten, in gevaarlijke of beperkt toegankelijke omgevingen, of waar een verhoogd infectierisico bestaat. Bij onderhouds- of reparatiewerkzaamheden, het opnemen van meetgegevens, visuele inspecties ...
(foto's: Festo)
Video:

