







Download het artikel in ![]()
ENGINEERINGNET.BE -- Belangrijk is uiteraard het snel afremmen en versnellen, tot driemaal sneller dan de zwaartekracht, zo blijkt... En uiteraard dat het mechatronisch geheel veilig is.
Het FMTC in Leuven heeft onlangs een in alle opzichten interessant mechatronisch demonstratieproject voltooid: een badminton-robot, die als handig prototype fungeert voor het uitproberen van nieuwe technologieën en concepten.
Jada, de naam van de robot , blijkt intussen al heel wat te kunnen: bij een spelletje badminton zou hij het al kunnen opnemen tegen menselijke tegenstanders, zonder dat hij zich moet schamen voor zijn prestaties.
Jada heeft twee camera's als ogen, drie computers als brein voor de aansturing van de ‘hand-oog coördinatie’, en drie motoren als spieren. «Hij beweegt vrij op drie assen en heeft een zeer hoge absolute nauwkeurigheid», stelt Joe De Waele, Business Development Manager. «Dat Jada zelf fouten maakt, is zo goed als uitgesloten».
Het onafhankelijke Belgische onderzoekscentrum FMTC - Flanders' Mechatronics Technology Centre - fungeert als schakel tussen wetenschappelijk onderzoek door universiteiten, hogescholen en de industrie. Het doel is de leden concurrentievoordelen te verschaffen door middel van innovatieve technologieën.
Negatieve versnelling«nog groter»
Om van deze voorsprong blijvend te kunnen profiteren, moeten de ingenieurs ook altijd de grootst mogelijke mate van veiligheid in hun ontwerpen inbouwen. In dit speciale geval moest er vooral rekening mee worden gehouden dat de arm die het badmintonracket vasthoudt, op een slede langs de horizontaal uitgelijnde hoofdas beweegt.
Aangezien de slede in totaal 50 kg weegt en bliksemsnel tot 3 m/s wordt versneld, zou bij een storing in de afrem-besturing een crash ontstaan, die tot een volledig economisch verlies van het systeem zou kunnen leiden. Om te zorgen dat de robot geschikt is voor het spel, moet hij in staat zijn in zeer korte tijd van richting te veranderen. Jada is daarom zo ontworpen dat hij met een maximum van 30 m/s² kan afremmen.
Deze afremsnelheid komt overeen met het meer dan drievoudige van de versnelling door de zwaartekracht. Ter vergelijking: deze remkrachten zijn groter dan bij bliksemsnelle achtbanen of veel formule-1-bolides het geval is.
De krachten in een ongecontroleerd geval van storing zijn nog eens significant hoger en de eisen aan de hier gebruikte noodrem derhalve enorm.
Voor de taak gebruikt men industriële schokdempers (van fabrikant ACE Stoßdämpfer). Deze dempingstechnologie is in staat de kinetische energie van de zware slede over de minimale afstand van 75 mm te absorberen en af te remmen, zonder dat de eindposities van de constructie schade oplopen. Daarvoor zorgt een maximaal toelaatbare krachtabsorptie van 1.020 Nm per per slag.
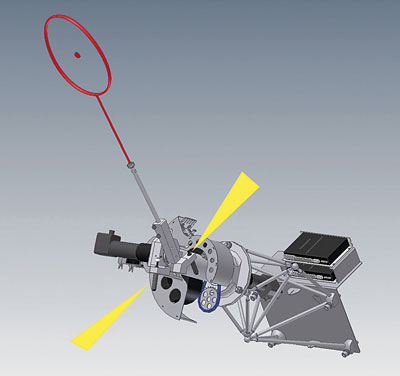
De sledeconstructie van badminton-robot Jada .
Meer assen - meer dempers
Het badmintonracket is in een om twee assen draaibare hand gemonteerd, die op de eerder genoemde slede horizontaal heen en weer beweegt. Daarbij gaat het om een as die de slagkracht en een as die de slagrichting bepaalt. De eerste is door de ontwerpers met ‘hitting axe’ aangeduid en de tweede met ‘rotating axe’.
Bij de ‘hitting axe’ zijn kleine schokdempers ingebouwd, bij de ‘rotating axe’ structuurdempers. De techniek van de kleine schokdempers is daarbij identiek aan die van de industriële schokdempers van de hoofdas.
Echter, zoals de aanduiding reeds doet vermoeden, zijn deze ontworpen voor aanzienlijk kleinere krachten, namelijk 20 Nm. Dat is minder dan twee procent van de krachten die de hierboven genoemde ingebouwde industriële schokdempers afbouwen. Gebruikt in dit deel van de badminton-robot, zijn de remprestaties van de kleine schokdempers echter volledig toereikend.
Daarnaast zijn de uit co-polyester-elastomeer bestaande structuurdempers als voordelige alternatieven voor de schokdempers ingebouwd. Deze kunnen overal worden toegepast waar geen exact stoppen op een exact bepaalde positie nodig is. In het hier vermelde geval was bovendien de kortere inbouwlengte dan die bij kleine en industriële schokdempers doorslaggevend.
Naar de toekomst toe is het de bedoeling dat de Jada-robot met behulp van een magnetisch veld nog vrijer over het speelveld kan bewegen. Nu is zijn spelruimte beperkt tot de achterlijn.