


Download het artikel in ![]()
ENGINEERINGNET.BE - Binnen de ERC-grant SPEAR wil onderzoeker Bram Vanderborght van de Vrije Universiteit Brussel een nieuw type actuator ontwikkelen om de nieuwe generatie robots aan te drijven. In dit artikel geeft hij zijn visie op een toekomst met co- en robots.
Waar de meeste mensen denken dat de uitdagingen zich vooral op gebied van kunstmatige intelligentie situeren, is ook het lichaam van de robot nog ver verwijderd van de eigenschappen van ons menselijk lichaam. Zo komen de spieren van de robots, de aandrijvingen of actuatoren, nog heel wat kracht en energie-efficiëntie te kort.
Actuatoren zijn belangrijke componenten voor het bewegen en sturen van een robot. Om bijvoorbeeld een industriële robotarm 10 kg te laten optillen, heb je al snel 100 kg robot nodig, terwijl een mens zijn eigen gewicht kan dragen. En wanneer robots voortbewegen, verbruiken ze typisch 100 keer méér energie dan een mens.
Er zijn verschillende toepassingen waar het ontbreken van geschikte actuatoren de verdere ontwikkeling hinderen. Om robots te ontwikkelen die ons gaan assisteren zoals humanoïde of menselijke robots, coworkers of samenwerkende robots in de maakindustrie of exoskeletons en prothesen, zijn aandrijvingen met tenminste dezelfde eigenschappen nodig. Daarom trachten we binnen de ERC grant «SPEAR» nieuwe types van actuatoren te ontwikkelen die de volgende generatie van robots kunnen aandrijven.
Samenwerking mens en robot
De ontwikkeling van de aandrijvingen heeft al een hele weg afgelegd. Vermits een elektrische motor heel snel draait, maar met weinig koppel (dus weinig kracht), is een tandwielkast nodig om de gewrichten van de robot voldoende krachtig te maken. Om de bewegingen van de robot te controleren worden de verschillende gewrichten in positie gestuurd. Dat maakt dat de robots heel precies en snel kunnen werken, ideaal voor industriële toepassingen.
Maar dat is anderzijds ook heel gevaarlijk want ze gaan de gewenste positie te allen tijde trachten te realiseren. Daarom staan dergelijke industriële robots in kooien opgesteld, gescheiden van mensen. Bij de nieuwe generatie robots willen we echter dat mens en robot gaan samenwerken. Veiligheid wordt dan ook het allerbelangrijkste. Om dat op te lossen wordt er gekeken naar onze menselijke spieren. Onze spieren zijn niet stijf, die hebben een zekere soepelheid. Dat maakt dat wanneer er een impact is, het gewricht de schok elastisch kan opvangen.
Een bijkomend voordeel is dat de spieren energie kunnen opslagen. Zoals een botsbal energie opslaagt bij het neerkomen en die terug vrijkomt bij de volgende sprong, lopen mens en dier ook met dergelijke energie recuperatiesystemen. Dat heeft ons labo en andere onderzoekers aangezet om actuatoren te ontwikkelen met een veer in serie met de motor. Ook hebben we mechanismen ontwikkeld zodat we de veerstijfheid kunnen aanpassen.
Hoewel het menselijk lichaam een rijke inspiratiebron is, kopiëren de onderzoekers het niet zomaar. In de robotica worden biologische modellen en principes vertaald naar een mechanische interpretatie om op die manier de performanties van de robots te verhogen. Met dit concept en aangepaste controlestrategieën voor veiligheid en energie-efficiëntie hebben we verschillende robots gebouwd met toepassingen vooral in de zorgsector en de maakindustrie: zo worden exoskeletons voor staprevalidatie en assistentie ontwikkeld, prothesen en ook sociale robots onder andere voor therapie met kinderen met autisme.
Daarnaast verricht de groep ook onderzoek naar co-workers en manipulatoren om de arbeiders in de maakindustrie te assisteren. Hierbij wordt er interdisciplinair samengewerkt zowel technische als humane en sociale wetenschappen, dit binnen het Brubotics-consortium.
Daarmee is de robotica al een heel eind verder gekomen, maar we zijn er nog niet. Laat een robot een last dragen, de kracht daarvoor blijft de motoren belasten. Dan zijn we terug een kijkje gaan nemen naar de natuur. Onze spier is niet één grote motor met een veer erin. Het bestaat uit heel wat seriële en parallelle spiervezels. Heffen we een licht object, dan gaan slechts enkele spiervezels geactiveerd worden. Bij een zware last gaan er veel spiervezels aangesproken worden, «variable recruitment» heet dat.

In het project is het de bedoeling dat we met heel wat vernieuwende ideeën experimenteren. We ontwikkelen nieuwe actuatoren waarin er heel wat motoren en veren zitten en controle-algoritmes die niet alleen als taak hebben om de gewenste taak te verrichten, maar doordat er meerdere motoren beschikbaar zijn, kan er geoptimaliseerd worden zodat die taak ook energie-efficiënt wordt uitgevoerd.
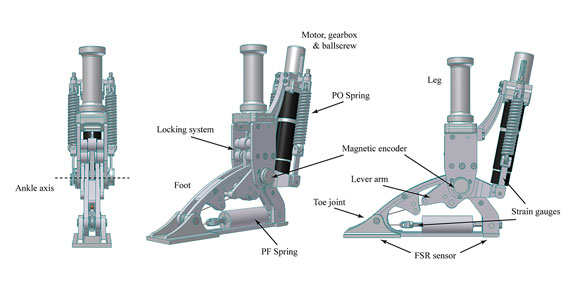
Ten slotte, een ander belangrijke nieuwe component zijn locking- of sluitingsmechanismen. Die laten toe bepaalde assen te vergrendelen zodat de elektrische motor zelf niet meer hoeft te werken. We hebben deze principes succesvol toegepast in de prothesen AMPfoot en Cyberlegs
(bron: wtnschp.be) (foto's: Pixabay, VUB)
door Prof. Dr. ir. Bram Vanderborght, VUB

