







ENGINEERINGNET -- Op basis van onderzoek van de labo's Biomechanica en Fysiologie aan de Universiteit Gent, bouwde Philippe Malcolm van de vakgroep Bewegings- en Sportwetenschappen een robotisch exoskelet – een robotschoen, zeg maar - dat het energieverbruik van de wandelaar verlaagt.
In tegenstelling tot andere projecten rond exoskeletten, waarvan er wereldwijd nogal wat zijn, vertrokken de Gentse onderzoekers niet vanuit de ingenieurstechniek, maar vanuit de biomechanica en de fysiologie van de bewegende mens.
Dat leverde een doorbraak op: voor het eerst komt de mogelijkheid in bereik om het 'metabole energieverbruik' van de 'robotschoen'-wandelaar te verlagen tot onder het niveau van wandelen zonder exoskelet. Enkel de energiebron blijft naar verluidt 'problematisch'.
Eerste exoskelet dat meer ondersteunt dan belemmert
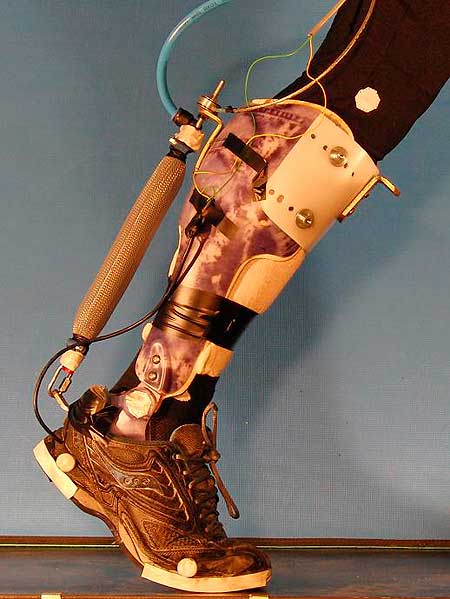
Het exoskelet is een soort robot die rond het menselijk lichaam gedragen wordt – in dit geval rond de voet en het onderbeen - en een ondersteunend mechanisch vermogen levert aan de gebruiker. De gebruiker stuurt het skelet aan door middel van sensoren en een controle-algoritme. Ideaal gezien moet het exoskelet in harmonie met de gebruiker bewegen.
Metabool energieverbruik
Tot nu toe zijn er geen gevallen bekend waarbij men het zogenaamde 'metabool energieverbruik' van de gebruiker kon verlagen tot onder het niveau van - aan dezelfde snelheid - wandelen zonder exoskelet. Het effect van de ondersteuning door het exoskelet werd steeds tenietgedaan door de toegenomen hinder vanwege het gewicht en belemmering van bewegingen.
Een mogelijke verklaring voor de beperkte prestaties van bestaande exoskeletten is misschien de voorlopig nog beperkte kennis over de menselijke interactie met het toestel. Er is bijvoorbeeld nog geen consensus over wat de optimale timing is om de afduwfase van de enkel te ondersteunen: op welk moment begint en stopt men het best met assisteren om een maximale assistentie en een minimale hinder te verkrijgen?
"Vanwege de vereiste technische vaardigheden voor de constructie van exoskeletten zijn de meeste publicaties geschreven door ingenieurs die wellicht minder vertrouwd zijn met de biomechanica en de fysiologie van de bewegende mens", aldus Malcolm.
In een gemeenschappelijk project van het Labo Biomechanica (prof. Dirk De Clercq) en het Labo Fysiologie (prof. Wim Derave) van de UGent bestudeerden de onderzoekers de mogelijkheid om de metabole energiekost te verminderen tot onder het niveau van wandelen zonder exoskelet door de timing van de aandrijving bij te regelen.
6% verder stappen met zelfde energieverbruik
Bij geoptimaliseerde timing van aandrijving kon de proefpersoon met het exoskelet theoretisch gezien 6% verder of 0.2 km/u sneller wandelen dan met gewone schoenen, en dit met dezelfde hoeveelheid energie uit voedsel.
"De timing waarbij we de grootste reductie in metabole energiekost vonden was deze waarbij de afduw door het exoskelet begint net voordat het tegenovergestelde been de grond raakt. Op basis van een combinatie van indicaties in de literatuur vermoeden we dat deze timing niet enkel specifiek voor ons exoskelet optimaal is maar voor een breed scala van toepassingen gebruikt kan worden", aldus Philippe Malcolm.
Toepassingen en uitdagingen
Als mogelijk toepassingen ziet Malcolm ondersteuning bij revalidatie, ondersteuning van mobiliteit bij mensen met een handicap (vb. spierzwakte, dwarslaesie, cerebrovasculair accident, …) of het verhogen van de uithouding bij normaal valide mensen die ver moeten wandelen in moeilijke omstandigheden (vb. reddingswerkers, soldaten, ontdekkingsreizigers, …).
De laatste twee toepassingen vereisen een voldoende krachtige draagbare energiebron, wat voorlopig nog problematisch is. Het exoskelet dat voor deze studie werd gebouwd werkt met perslucht, wat de actieradius danig beperkt.
Opnames met 'motion capture'-technieken wijzen echter uit dat het vereiste vermogen theoretisch gezien gehaald kan worden uit het afremmen van de zwaaifase in de knie die spontaan voorkomt tijdens de wandelbeweging. Dit zou volgens een gelijkaardig principe gebeuren als het regenereren van het remvermogen in hybride wagens.
Malcolm: "Zo is het theoretisch mogelijk om in de toekomst volledig ambulante exoskeletten te bouwen die de metabole energiekost van wandelen verminderen zonder beperking in batterijvermogen. Zodra dit een feit is zouden exoskeletten praktisch nuttig worden en ons dagelijks leven beginnen voorkomen. Sommige auteurs voorspellen al dat dit verwezenlijkt zal worden vanaf 2024."
Verdere ontwikkeling
De onderzoekers zetten het exoskelet nu verder op punt met de hulp van de vakgroep Toegepaste Materiaalwetenschappen van de UGent (prof. Joris Degrieck). Verder wordt ook onderzocht hoe het exoskelet werkt tijdens maximale inspanningen, om zo de mechanismen van lichamelijke vermoeidheid beter te begrijpen. Dit onderzoek zal plaatsvinden in de iRUNman- onderzoeksinfrastructuur voor bewegingswetenschap die gesubsidieerd is door Vlaamse Herculesstichting.
Het onderzoek werd gepubliceerd in het toonaangevende tijdschrift PLOS ONE.
Video:

